Basic Description: Nonlinear filters compute statistics within a neighborhood and replace pixel values with a selected statistical parameter.
Technical Details: A nonlinear filter is an operation where each filtered pixel is a nonlinear function of the source pixel and its neighbors. The result is not a linear combination of the pixels in a neighborhood but are instead based on some ordering (such as median) or statistic (such as standard deviation or IQR) that cannot be implemented as a convolution. For this reason, nonlinear filter operations are typically much slower than linear filter operations.
Instructions: After choosing a selection method and making your selection on the survey, select parameters in the following order (go to each section for details):
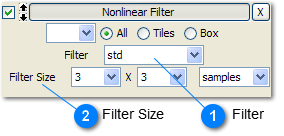
 Filter
Choose one of the available nonlinear filters:
-
std returns the standard deviation of the data values in the neighborhood defined by the size parameter.
-
range returns the range of values in the neighborhood
-
var returns the variance in the neighborhood
-
min returns the minimum of the data values (this is implemented as a morphological erosion operation)
-
corr returns the correlation coefficient of the values in the window
-
max returns the maximum of the data values (this is implemented as a morphological dilation operation)
-
median returns the median of the data values (equivalent to percentile where n = 50)
-
iqr returns the interquartile range (between the 25th and 75th percentiles)
|
 Filter Size
Choose the width and height of the search window. A larger window uses more values to compute the statistics.
You can use samples (pixels) or meters to define the filter size. If meters are used, the filter will determine how many pixels to use and round off by the sampling interval. Using meters is particularly useful when you have tiles with different sampling densities in the same survey. In this case the filter size will remain roughly the same across all tiles.
|